
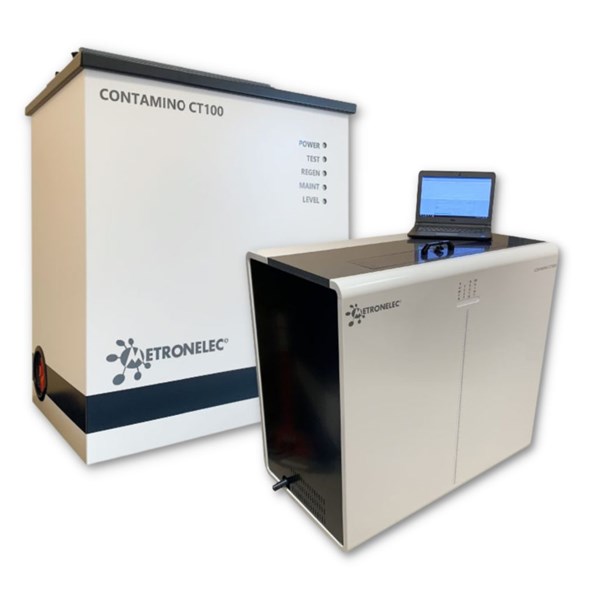
Trong quá trình sản xuất và gia công bo mạch in (PCBA), việc loại bỏ hoàn toàn các cặn bẩn hóa học, chất trợ hàn (flux) và các tạp chất ion là yêu cầu bắt buộc để đảm bảo tuổi thọ của sản phẩm. Nếu không được kiểm soát tốt, các ion dư thừa dưới tác động của độ ẩm và điện áp sẽ sinh ra hiện tượng di cư điện hóa (Electrochemical Migration), gây đoản mạch và hỏng hóc nghiêm trọng.

Trong quá trình sản xuất và lắp ráp điện tử (PCBA), chất lượng của một bo mạch phụ thuộc rất lớn vào độ tin cậy của các mối hàn. Một mối hàn hoàn hảo không chỉ đòi hỏi công nghệ hàn tiên tiến mà còn phụ thuộc vào tính hàn (solderability) của chính linh kiện và bề mặt bo mạch in (PCB). Để đo lường khách quan yếu tố sống còn này, Metronelec – nhà tiên phong với hơn 40 năm kinh nghiệm – đã mang đến hệ thống Solderability Tester / Wetting Balance.
Trong ngành công nghiệp sản xuất và lắp ráp điện tử (PCBA - Printed Circuit Board Assembly), chất lượng không chỉ là một mục tiêu phấn đấu mà là yếu tố sống còn quyết định uy tín của doanh nghiệp. Cùng với sự thu nhỏ liên tục của các linh kiện (miniaturization) và các yêu cầu khắt khe về độ tin cậy trong các lĩnh vực như ô tô (EV), hàng không vũ trụ và y tế, việc kiểm soát chất lượng ở cấp độ vi mô trở nên quan trọng hơn bao giờ hết.
Vòi robot có thể siết, hút và giữ chặt mọi loại đồ vật với nhiều hình dạng khác nhau nhờ mô phỏng vòi bạch tuộc.
Hai phần ba tế bào thần kinh của bạch tuộc nằm trong các vòi của nó, mỗi vòi thực sự có một ý nghĩ riêng. Vòi bạch tuộc có thể tháo dây trói, mở nút chai và quấn quanh con mồi với bất kỳ hình dạng hoặc kích thước nào. Hàng trăm mút trên vòi của bạch tuộc có thể tạo lực hút mạnh ngay cả trên những bề mặt gồ ghề dưới nước.
Các nhà nghiên cứu tại khoa Khoa học Ứng dụng trường Đại học Harvard (Mỹ) và Đại học Beihang (Trung Quốc) đã phát triển một loại robot mềm mô phỏng giống vòi bạch tuộc có thể kẹp, di chuyển và điều khiển một loạt các vật thể. Thiết kế nhỏ gọn, linh hoạt, hoàn chỉnh với các ống hút, giúp robot cầm nắm chắc chắn các đồ vật ở mọi hình dạng, kích cỡ và kết cấu từ quả trứng, điện thoại cho đến những quả bóng lớn.
Hầu hết các nghiên cứu trước đây về robot lấy cảm hứng từ bạch tuộc tập trung vào việc bắt chước lực hút hoặc chuyển động của vòi, nhưng chưa kết hợp cả hai, tiến sĩ August Domel, đồng tác giả nghiên cứu cho biết. Ông nói: "Đây là nghiên cứu đầu tiên định lượng các góc chuyển động của vòi bạch tuộc, các chức năng kết hợp uốn và hút cho phép dùng một thiết bị robot duy nhất để tương tác cho một loạt các vật thể".
Các nhà khoa học nghiên cứu góc nghiêng của vòi bạch tuộc và định lượng thiết kế robot mềm có thể uốn và nắm lấy vật thể giống cách con bạch tuộc làm. Tiếp theo, nhóm nghiên cứu xem xét bố cục và cấu trúc của các ống hút sau đó kết hợp chúng vào thiết kế hoàn chỉnh.

Robot thân mềm được điều khiển bởi hai van, một để tạo áp lực cho việc uốn cong vòi và một dùng chân không hút đồ vật. Bằng cách thay đổi áp suất và chân không, vòi robot có thể bám, quấn quanh và giữ chặt bất kỳ đồ vật nào.
"Chúng tôi đã bắt chước cấu trúc chung và phân phối của những chiếc mút này vào các bộ truyền động mềm trong vòi robot. Mặc dù thiết kế đơn giản hơn nhiều so với vòi bạch tuộc thật nhưng vòi robot có thể hút và tương tác hầu hết mọi đối tượng", tiến sĩ Zhexin Xie tại Đại học Beihang cho biết.
Các nhà nghiên cứu đã thử nghiệm thành công thiết bị trên nhiều vật thể khác nhau bao gồm các tấm nhựa mỏng, ly cà phê, ống nghiệm, trứng và thậm chí cả một con cua sống. Việc uốn cong và cuộn lại cho phép vòi robot siết và giữ chặt đồ vật.
Katia Bertoldi, Giáo sư Cơ học Ứng dụng William và Ami Kuan Danoff tại Đại học Harvard, hai tác giả chính của nghiên cứu cho biết, kết quả từ nghiên cứu không chỉ cung cấp những cách thức mới về việc tạo ra các bộ truyền động robot mềm thế hệ tiếp theo để nắm bắt một loạt các vật thể đa dạng về hình thái mà còn góp phần đưa ra những hiểu biết về ý nghĩa chức năng sự thay đổi góc của vòi các loài bạch tuộc.
Nguồn: vnexpress.net
(84) 896 555 247