Đầu dò kích hoạt cảm ứng thay đổi mô-đun nhỏ gọn, cho phép sử dụng nhiều cấu hình và tiện ích mở rộng bút cảm ứng để truy cập các tính năng trên các bộ phận phức tạp TP20 với MCR20 và PI 200-3 TP20 là hệ thống đầu dò cảm ứng động học 5 chiều hoặc 6 chiều nhỏ gọn. Thiết kế hai mảnh, bao gồm thân đầu dò và (các) mô-đun bút cảm ứng có thể tháo rời, được kết nối bằng khớp nối động học từ tính có độ lặp lại cao.
Đầu dò kích hoạt cảm ứng thay đổi mô-đun nhỏ gọn, cho phép sử dụng nhiều cấu hình và tiện ích mở rộng bút cảm ứng để truy cập các tính năng trên các bộ phận phức tạp TP20 với MCR20 và PI 200-3 TP20 là hệ thống đầu dò cảm ứng động học 5 chiều hoặc 6 chiều nhỏ gọn. Thiết kế hai mảnh, bao gồm thân đầu dò và (các) mô-đun bút cảm ứng có thể tháo rời, được kết nối bằng khớp nối động học từ tính có độ lặp lại cao.
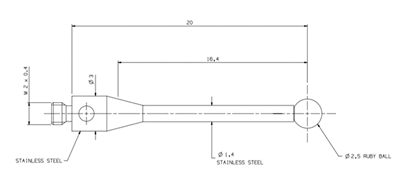
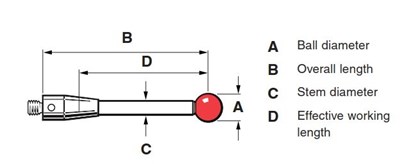
Về nguyên tắc, kim đo là “công cụ” của máy đo tọa độ (CMM), cung cấp mối quan hệ tương tự như các công cụ tiện có với máy tiện và các công cụ phay và doa có với máy phay. Khi đo bằng đầu cảm biến, máy sử dụng kim để lấy các điểm dữ liệu trên bề mặt phôi. Mỗi lần chạm sẽ tạo ra một điểm được xác định bằng cách sử dụng các giá trị tọa độ trong X, Y và Z. Sau đó, tính năng, kích thước, hình thức và vị trí có thể được tính toán từ các điểm này.
Về nguyên tắc, kim đo là “công cụ” của máy đo tọa độ (CMM), cung cấp mối quan hệ tương tự như các công cụ tiện có với máy tiện và các công cụ phay và doa có với máy phay. Khi đo bằng đầu cảm biến, máy sử dụng kim để lấy các điểm dữ liệu trên bề mặt phôi. Mỗi lần chạm sẽ tạo ra một điểm được xác định bằng cách sử dụng các giá trị tọa độ trong X, Y và Z. Sau đó, tính năng, kích thước, hình thức và vị trí có thể được tính toán từ các điểm này.
Về nguyên tắc, kim đo là “công cụ” của máy đo tọa độ (CMM), cung cấp mối quan hệ tương tự như các công cụ tiện có với máy tiện và các công cụ phay và doa có với máy phay. Khi đo bằng đầu cảm biến, máy sử dụng kim để lấy các điểm dữ liệu trên bề mặt phôi. Mỗi lần chạm sẽ tạo ra một điểm được xác định bằng cách sử dụng các giá trị tọa độ trong X, Y và Z. Sau đó, tính năng, kích thước, hình thức và vị trí có thể được tính toán từ các điểm này.
Về nguyên tắc, kim đo là “công cụ” của máy đo tọa độ (CMM), cung cấp mối quan hệ tương tự như các công cụ tiện có với máy tiện và các công cụ phay và doa có với máy phay. Khi đo bằng đầu cảm biến, máy sử dụng kim để lấy các điểm dữ liệu trên bề mặt phôi. Mỗi lần chạm sẽ tạo ra một điểm được xác định bằng cách sử dụng các giá trị tọa độ trong X, Y và Z. Sau đó, tính năng, kích thước, hình thức và vị trí có thể được tính toán từ các điểm này.
Về nguyên tắc, kim đo là “công cụ” của máy đo tọa độ (CMM), cung cấp mối quan hệ tương tự như các công cụ tiện có với máy tiện và các công cụ phay và doa có với máy phay. Khi đo bằng đầu cảm biến, máy sử dụng kim để lấy các điểm dữ liệu trên bề mặt phôi. Mỗi lần chạm sẽ tạo ra một điểm được xác định bằng cách sử dụng các giá trị tọa độ trong X, Y và Z. Sau đó, tính năng, kích thước, hình thức và vị trí có thể được tính toán từ các điểm này.
Về nguyên tắc, kim đo là “công cụ” của máy đo tọa độ (CMM), cung cấp mối quan hệ tương tự như các công cụ tiện có với máy tiện và các công cụ phay và doa có với máy phay. Khi đo bằng đầu cảm biến, máy sử dụng kim để lấy các điểm dữ liệu trên bề mặt phôi. Mỗi lần chạm sẽ tạo ra một điểm được xác định bằng cách sử dụng các giá trị tọa độ trong X, Y và Z. Sau đó, tính năng, kích thước, hình thức và vị trí có thể được tính toán từ các điểm này.
Về nguyên tắc, kim đo là “công cụ” của máy đo tọa độ (CMM), cung cấp mối quan hệ tương tự như các công cụ tiện có với máy tiện và các công cụ phay và doa có với máy phay. Khi đo bằng đầu cảm biến, máy sử dụng kim để lấy các điểm dữ liệu trên bề mặt phôi. Mỗi lần chạm sẽ tạo ra một điểm được xác định bằng cách sử dụng các giá trị tọa độ trong X, Y và Z. Sau đó, tính năng, kích thước, hình thức và vị trí có thể được tính toán từ các điểm này.
Về nguyên tắc, kim đo là “công cụ” của máy đo tọa độ (CMM), cung cấp mối quan hệ tương tự như các công cụ tiện có với máy tiện và các công cụ phay và doa có với máy phay. Khi đo bằng đầu cảm biến, máy sử dụng kim để lấy các điểm dữ liệu trên bề mặt phôi. Mỗi lần chạm sẽ tạo ra một điểm được xác định bằng cách sử dụng các giá trị tọa độ trong X, Y và Z. Sau đó, tính năng, kích thước, hình thức và vị trí có thể được tính toán từ các điểm này.
Về nguyên tắc, kim đo là “công cụ” của máy đo tọa độ (CMM), cung cấp mối quan hệ tương tự như các công cụ tiện có với máy tiện và các công cụ phay và doa có với máy phay. Khi đo bằng đầu cảm biến, máy sử dụng kim để lấy các điểm dữ liệu trên bề mặt phôi. Mỗi lần chạm sẽ tạo ra một điểm được xác định bằng cách sử dụng các giá trị tọa độ trong X, Y và Z. Sau đó, tính năng, kích thước, hình thức và vị trí có thể được tính toán từ các điểm này.
Phạm vi của đầu PH10 PLUS tăng công suất bằng cách cung cấp cho CMM tự động khả năng bổ sung về định hướng lại đầu dò được điều khiển theo chương trình. Phạm vi này bao gồm ba mẫu PH10 PLUS, mỗi mẫu có thể mang nhiều loại đầu dò và phần mở rộng và có thể được định hướng ở 720 vị trí lặp lại, cho phép truy cập vào các tính năng phôi khó tiếp cận nhất.
(84) 896 555 247