Đầu đo Renishaw PH20 hỗ trợ tính năng hiệu chuẩn nhanh "Inferential Calibration" cho tất cả các góc độ. Điều này giúp người dùng PH20 Renishaw tiết kiệm hàng giờ đồng hồ thiết lập mỗi ngày. Khả năng xoay linh hoạt của PH20 Renishaw cho phép đo các lỗ sâu và hẹp một cách dễ dàng. Mọi chu trình đo lường với PH20 Renishaw đều được tối ưu hóa để mang lại dữ liệu tin cậy nhất.
Khi yêu cầu về độ chính xác vượt xa các tiêu chuẩn thông thường, OMP400 Renishaw là giải pháp tối ưu nhất hiện nay. Sử dụng công nghệ cảm biến biến dạng (strain gauge), OMP400 Renishaw mang lại độ lặp lại vượt trội so với các đầu đo cơ học. Việc tích hợp OMP400 Renishaw giúp doanh nghiệp xử lý các chi tiết có độ dung sai cực nhỏ một cách dễ dàng.
Renishaw REVO-2 cho phép quét tốc độ cao, kiểm tra không tiếp xúc và phân tích độ hoàn thiện bề mặt trên một máy CMM duy nhất. Là giải pháp mới hoặc nâng cấp được chứng nhận, REVO tối ưu hóa chất lượng, giảm chi phí đầu tư, phù hợp cho các ngành sản xuất chính xác.
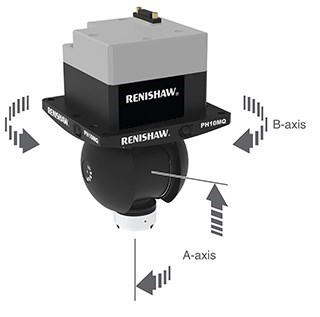
Phạm vi của đầu PH10 PLUS tăng công suất bằng cách cung cấp cho CMM tự động khả năng bổ sung về định hướng lại đầu dò được điều khiển theo chương trình. Phạm vi này bao gồm ba mẫu PH10 PLUS, mỗi mẫu có thể mang nhiều loại đầu dò và phần mở rộng và có thể được định hướng ở 720 vị trí lặp lại, cho phép truy cập vào các tính năng phôi khó tiếp cận nhất.
Phạm vi của đầu PH10 PLUS tăng công suất bằng cách cung cấp cho CMM tự động khả năng bổ sung về định hướng lại đầu dò được điều khiển theo chương trình.
Phạm vi của đầu PH10 PLUS tăng công suất bằng cách cung cấp cho CMM tự động khả năng bổ sung về định hướng lại đầu dò được điều khiển theo chương trình.
Trong các nhà máy gia công nhỏ và vừa, OMP40 Renishaw là thiết bị đo chạm quang học cực kỳ phổ biến. Với thiết kế siêu nhỏ gọn, OMP40 Renishaw cho phép lắp đặt trên nhiều loại máy phay CNC mà không lo va chạm. Việc sử dụng OMP40 Renishaw giúp rút ngắn thời gian xác định gốc tọa độ phôi một cách đáng kể và đảm bảo độ chính xác lặp lại tuyệt vời ngay cả khi gia công các chi tiết phức tạp.
Trong các nhà máy gia công lớn, OMP60 Renishaw là sự lựa chọn hàng đầu nhờ khả năng truyền tín hiệu quang học mạnh mẽ. Việc tích hợp OMP60 Renishaw giúp quy trình thiết lập phôi trở nên nhanh chóng và đạt độ chuẩn xác cấp micron. Hệ thống OMP60 Renishaw sử dụng công nghệ hồng ngoại để giao tiếp trực tiếp với bộ điều khiển máy CNC. Với OMP60 Renishaw, bạn có thể đo các chi tiết có kích thước lớn mà không gặp trở ngại về khoảng cách tín hiệu.
Hệ thống OMP600 Renishaw là một trong những dòng đầu đo quang học hiệu suất cao nhất dành cho các máy CNC chuyên dụng. Với thiết kế chắc chắn và độ chính xác vượt trội, OMP600 Renishaw đáp ứng mọi yêu cầu khắt khe trong kiểm soát quy trình gia công. Việc sử dụng MP600 Renishaw giúp doanh nghiệp tự động hóa hoàn toàn bước rà phôi và kiểm tra chi tiết.
Trong các trung tâm gia công nhỏ gọn, RMP40 Renishaw là giải pháp đo phôi không dây cực kỳ linh hoạt. Sử dụng công nghệ truyền sóng vô tuyến, RMP40 Renishaw giúp loại bỏ các hạn chế về tầm nhìn mà hệ thống OPM quang học thường gặp phải.
Đầu đo RMP60 Renishaw là tiêu chuẩn toàn cầu cho các ứng dụng đo lường không dây trên các máy gia công lớn. Với công nghệ truyền tín hiệu bằng sóng vô tuyến, RMP60 Renishaw giải quyết triệt để các bài toán về vật cản tín hiệu. Việc sử dụng RMP60 Renishaw giúp quy trình rà phôi trở nên linh hoạt hơn bao giờ hết trên các máy 5 trục.
RMP400 Renishaw là thiết bị không thể bỏ qua. Nhờ tích hợp công nghệ cảm biến biến dạng tiên tiến cùng truyền sóng radio, RMP400 Renishaw mang lại độ lặp lại vượt trội. Việc sử dụng RMP400 Renishaw giúp đo các biên dạng phức tạp với lực kích hoạt cực thấp, tránh làm trầy xước phôi. Hệ thống RMP400 Renishaw là lựa chọn số một cho gia công khuôn mẫu và các chi tiết hàng không. Sự hiện diện của RMP400 Renishaw giúp quy trình sản xuất của bạn đạt đến độ tinh xảo tuyệt đối.
(84) 896 555 247